Jessica Yin
Email: jessicayin98 AT gmail DOT com
I am a Robotics Resesarcher at NVIDIA. My research focuses on tactile sensing for dexterous robot manipulation, with a special interest in how advancements in sensor design, simulation, and robot control frameworks can be leveraged together for human-like robot dexterity.
I completed my PhD at the University of Pennsylvania GRASP Lab and my BS at Carnegie Mellon University. During my PhD, I was a NSF Graduate Research Fellow and interned at Toyota Research Institute and Meta FAIR. After my PhD, I was a Postdoctoral Researcher at Meta FAIR with the Embodied AI/Robotics team.
G. Scholar
LinkedIn
CV

OSMO: An Open-Source Tactile Glove for Human-to-Robot Skill Transfer
Jessica Yin, Haozhi Qi*, Youngsun Wi*, Sayantan Kundu, Mike Lambeta, William Yang, Changhao Wang, Tingfan Wu, Jitendra Malik, Tess Hellebrekers
Website •
ArXiv •
Code + Hardware •
RSS Workshop Talk
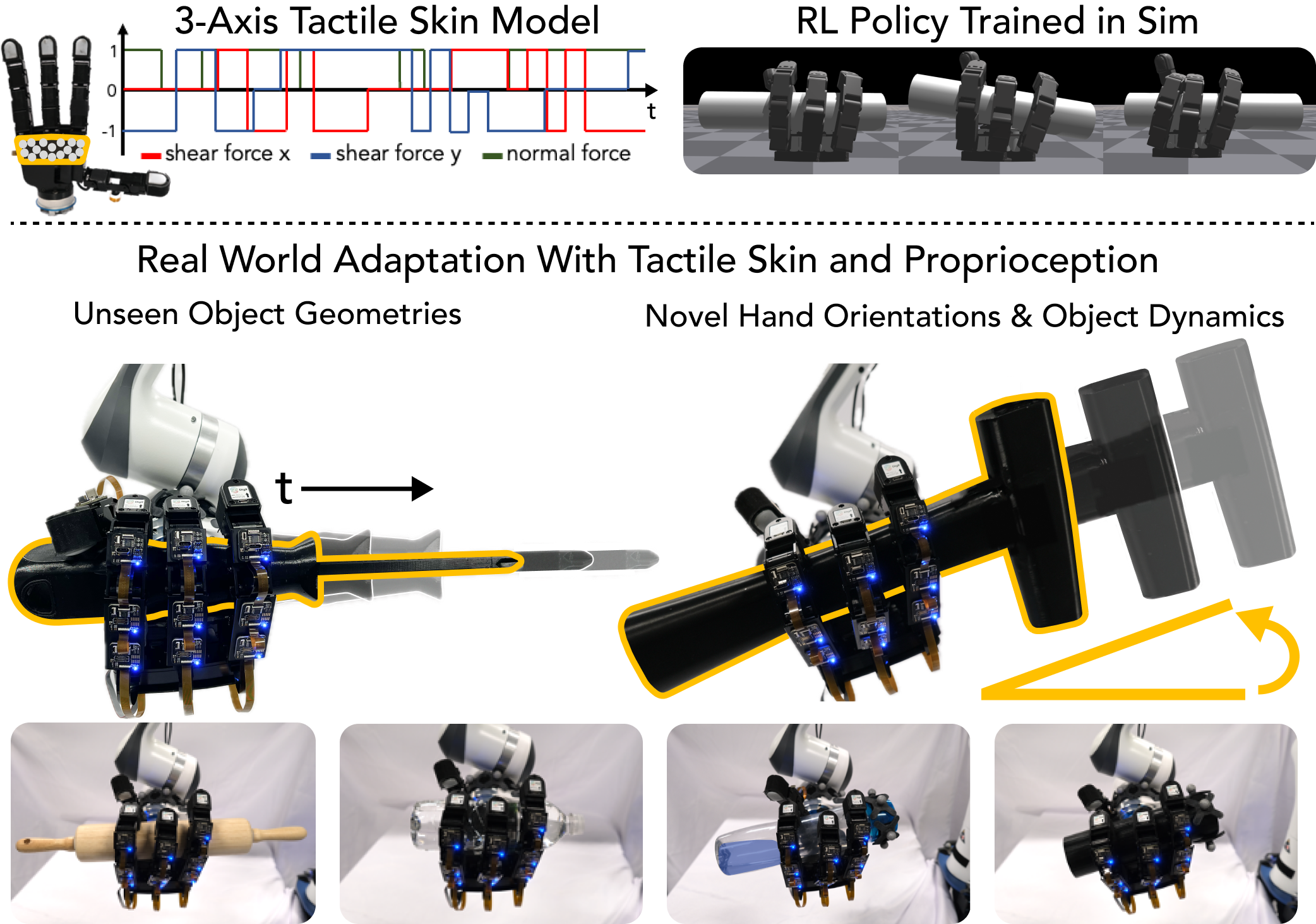
Learning In-Hand Traslation Using Tactile Skin with Shear and Normal Force Sensing
Jessica Yin, Haozhi Qi, Jitendra Malik, James Pikul, Mark Yim, and Tess Hellebrekers
IEEE International Conference on Robotics and Automation (ICRA) 2025
Website •
ArXiv •
Code
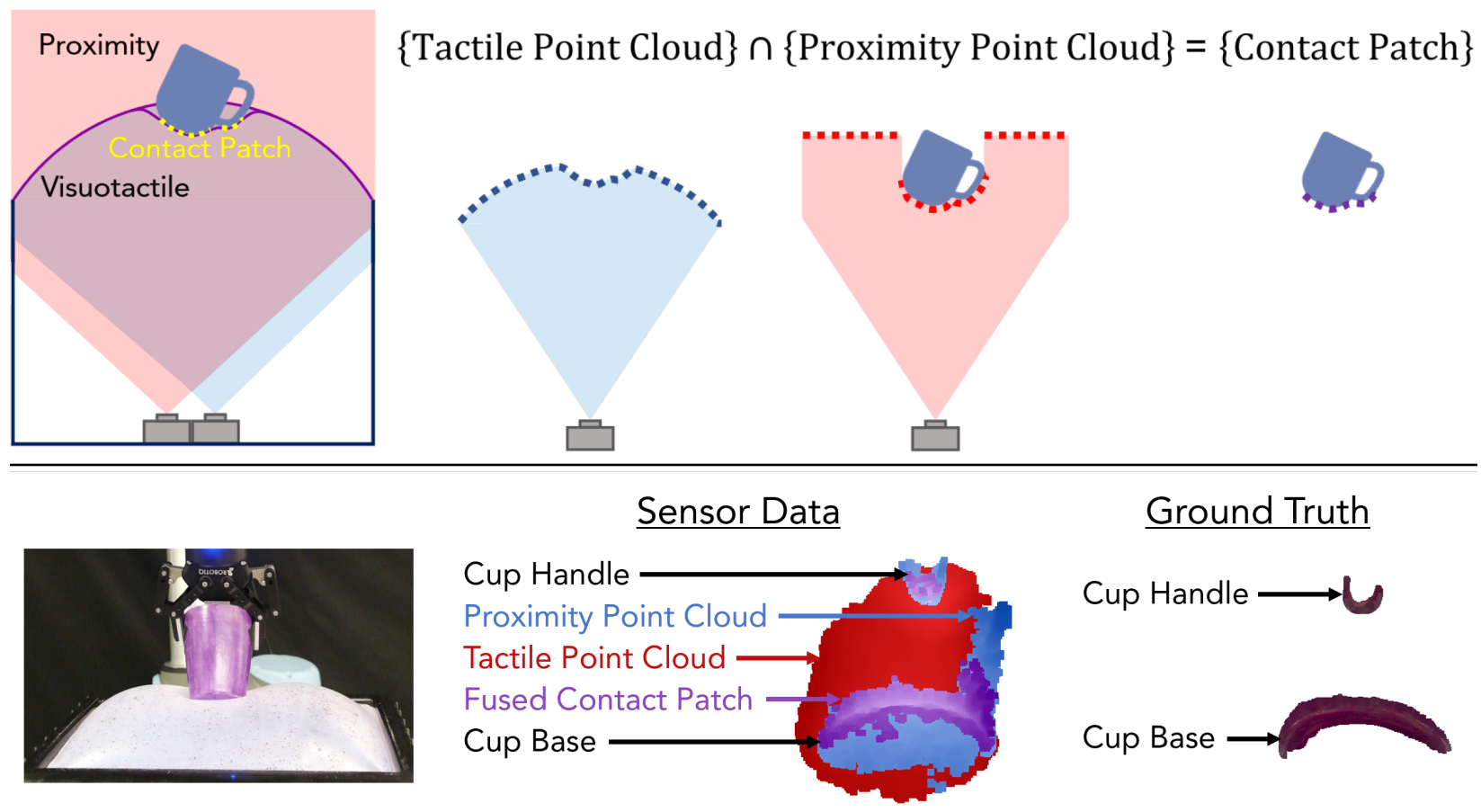
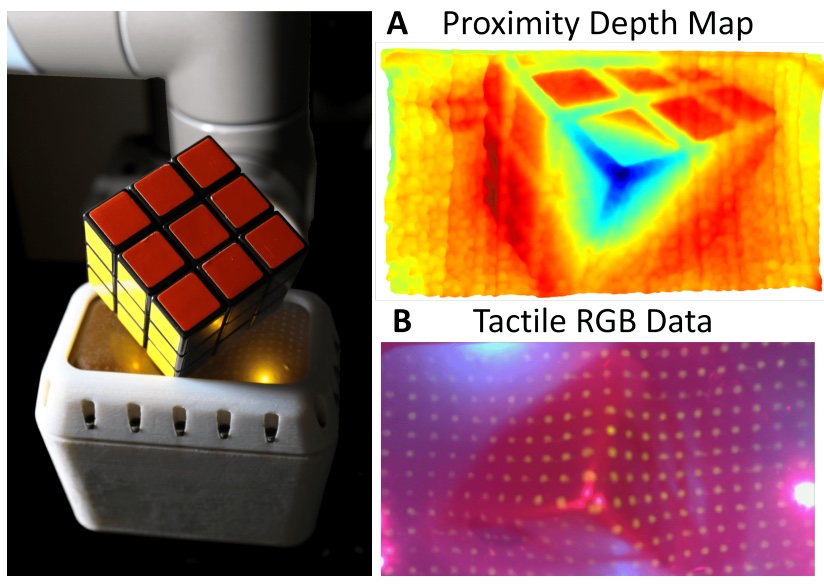
Proximity and Visuotactile Point Cloud Fusion for Contact Patches in Extreme Deformation
Jessica Yin, Paarth Shah, Naveen Kuppuswamy, Andrew Beaulieu, Avinash Uttamchandani, Alejandro Castro, James Pikul, and Russ Tedrake
IEEE International Conference on Robotics and Automation (ICRA) 2025
ArXiv
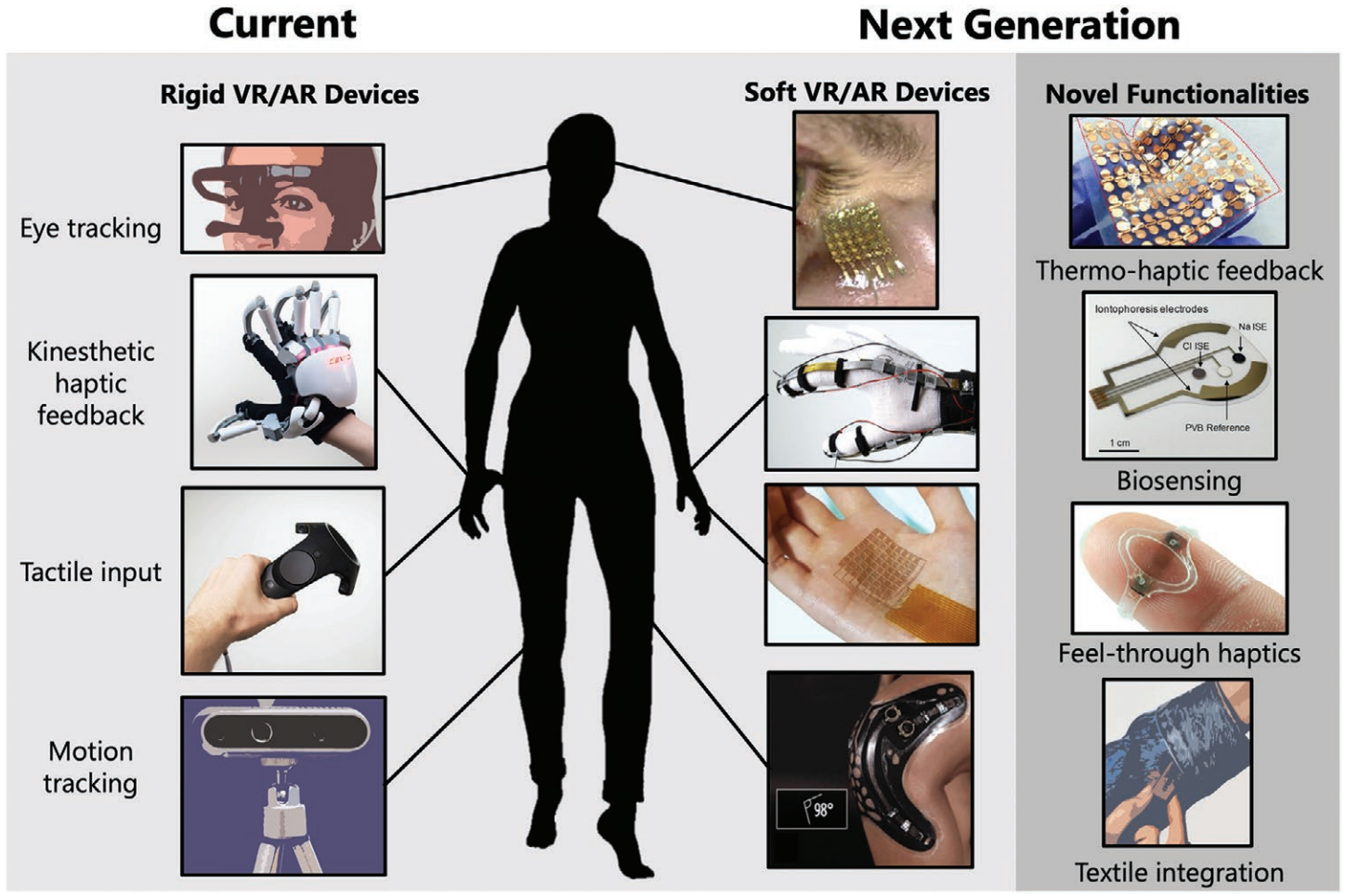
Wearable Soft Technologies for Haptic Sensing and Feedback
Jessica Yin, Ronan Hinchet, Herbert Shea, Carmel Majidi
Advanced Functional Materials 2021
PDF

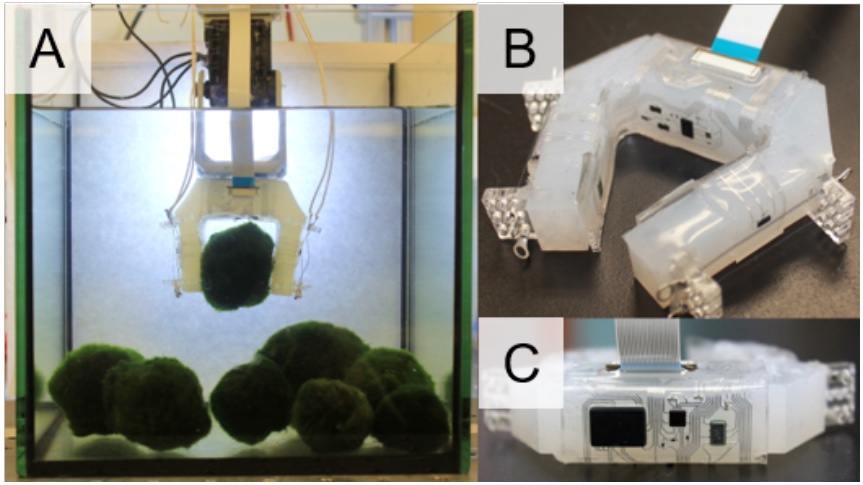
Closing the Loop with Liquid-Metal Sensing Skin for Autonomous Soft Robot Gripping
Jessica Yin, Tess Hellebrekers, and Carmel Majidi
IEEE International Conference on Soft Robotics (RoboSoft) 2020
PDF
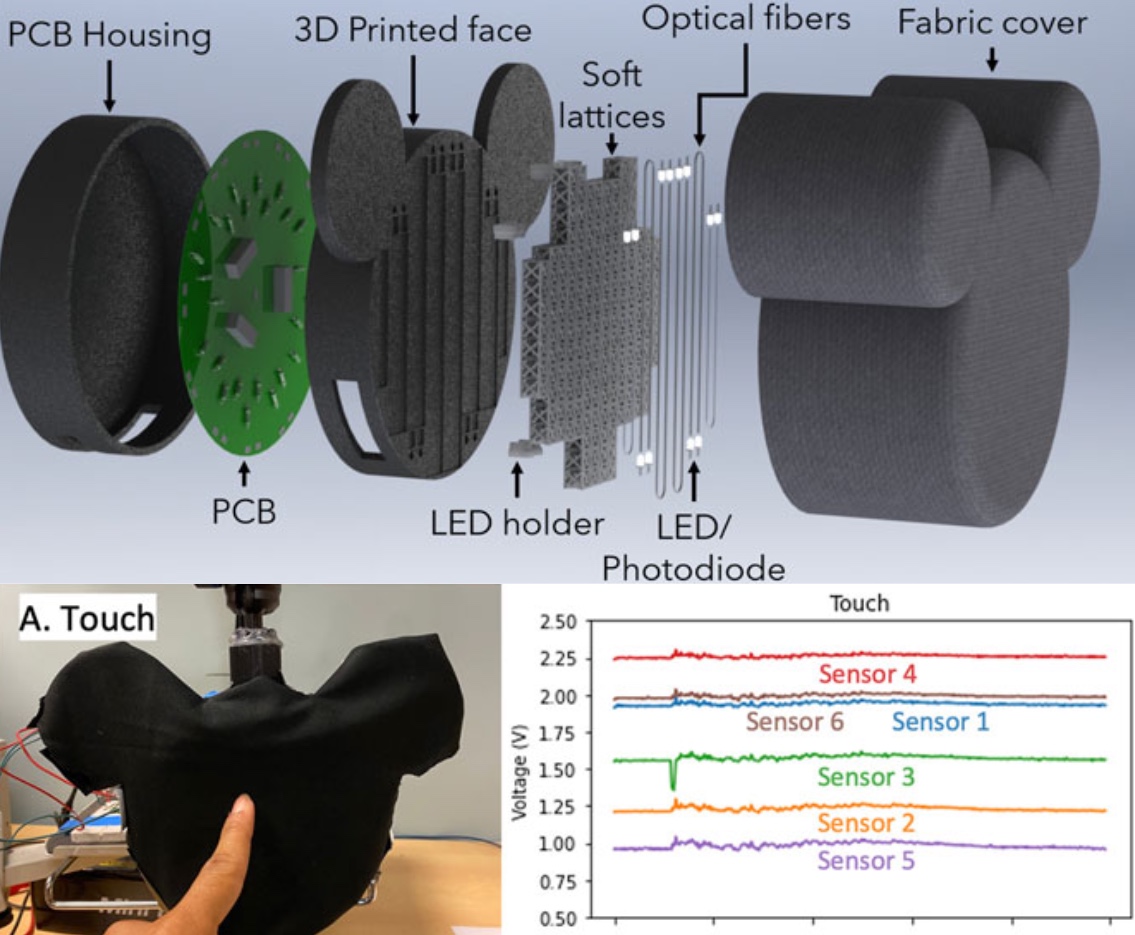
Towards an AI-driven soft toy for automatically detecting and classifying infant-toy interactions using optical force sensors
Rithwik Udayagi, Jessica Yin, Xinyao Cai, William Townsend, Varun Trivedi, Rohan Shende, O. Francis Sowande, Laura Prosser, James Pikul, and Michelle Johnson
Frontiers in Robotics and AI 2024
Paper
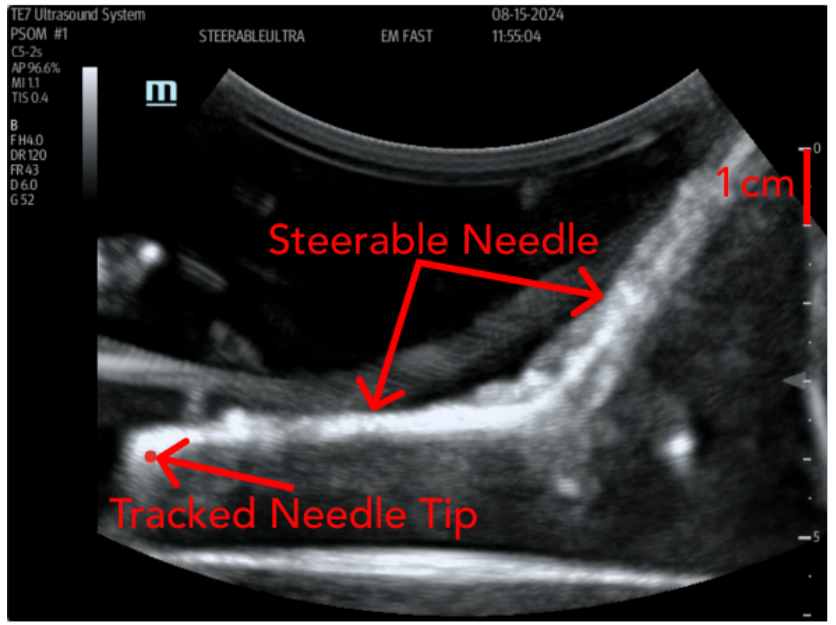
Steerable Tape-Spring Needle for Autonomous Sharp Turns Through Tissue
Omar Abdoun, Devin Tjandra, Katie Yin, Pablo Kurzan, Jessica Yin, and Mark Yim
IEEE International Conference on Robotics and Automation (ICRA) 2025
bioArXiv
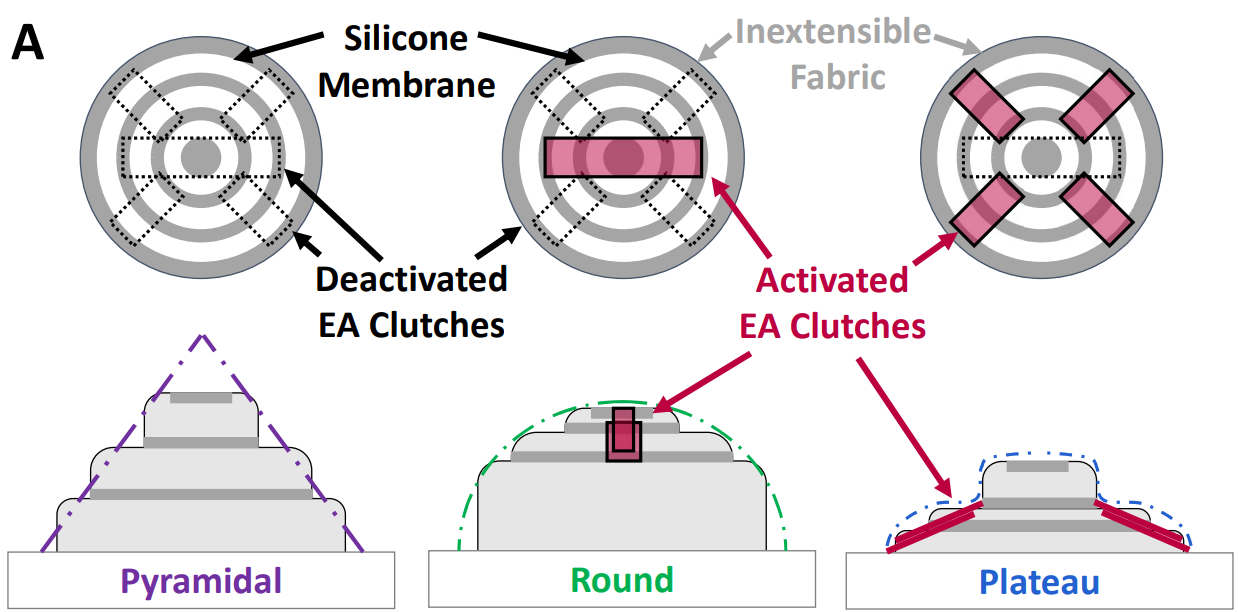
Electroadhesive Clutches for Programmable Shape Morphing of Soft Actuators
Gregory M. Campbell, Jessica Yin, James Pikul, and Mark Yim
IEEE International Conference on Intelligent Robots and Systems (IROS) 2022
ArXiv
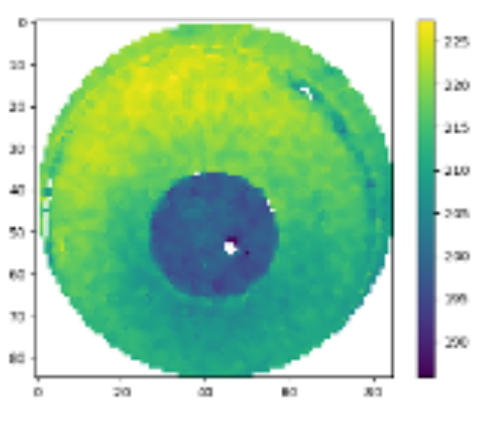
Contact force estimation from deformation of surface
Kyung Eun Kim, Jessica Yin, Gregory M. Campbell, James Pikul, and Christain Santangelo
APS March Meeting 2022
Abstract
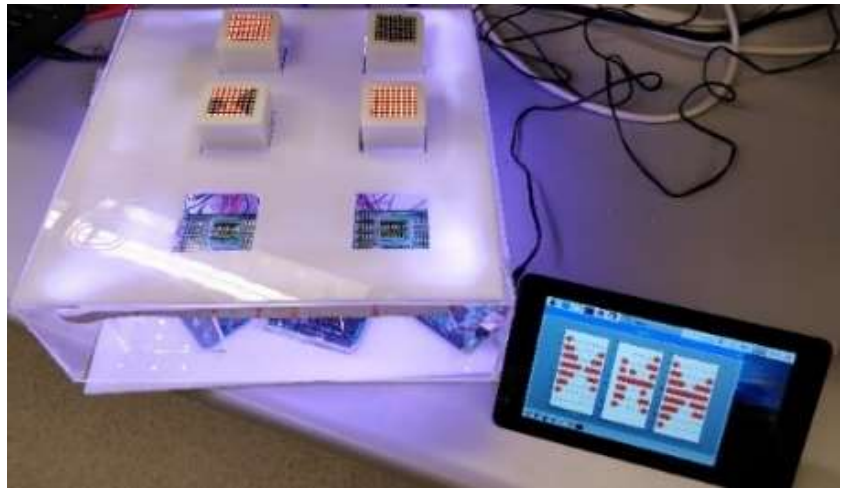
Real-Time Visualization of Neural Network Training to Supplement Machine Learning Education
Michael You and Jessica Yin
IEEE Integrated STEM Education Conference (ISEC) 2019
PDF
Liquid Metal-Microelectronics Integration for a Sensorized Soft Robot Skin
Tess Hellebrekers, Kadri Bugra Ozutemiz, Jessica Yin, and Carmel Majidi
IEEE International Conference on Intelligent Robots and Systems (IROS) 2024.
PDF
2025
Started as a Research Scientist with the Dex team at NVIDIA! 🎉2024
Started postdoc at Meta FAIR with Tess Hellebrekers and Jitendra Malik2023
Patent filed with University of Pennsylvania2022
Best Student Paper Award at IEEE RoboSoft